MATrICP
论文
Improved techniques for multi-view registration with motion averaging
Li, Zhongyu Zhu, Jihua Lan, Ke Li, Chen Fang, Chaowei
核心思想
将Trimmed ICP与运动平均算法结合起来,应用到多视角聚类上。
算法步骤
1. 估算各帧之间的重叠百分比$\xi_{i,j}$
总的来说,估算各帧之间的重叠百分比主要分为两步:
(1) 对于每一帧,计算其$d_{threshold}$
(2) 计算出每一帧的$d_{threshold}$之后,使用该参数计算该帧与其他帧的重叠百分比。
1.0 背景知识
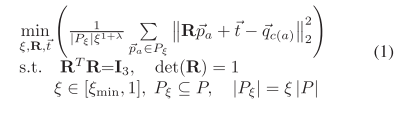
ObjFunc:
1.1 计算$d_{threshold}$
对于第i帧的每一个点,可以在其他所有帧中寻找到N-1个对应点(通过NN),假设第i帧有$N_i$个点,那么一共会有$N_i * (N-1)$个点对与距离。因为我们是要进行多视角配准的,相当于把当前帧作为源scan,其他所有帧组成的模型作为目标模板进行配准。所以将这些所有距离按照从小到大进行排序,然后依次对于每一个距离,计算该距离以及之前所有距离对应的ObjectFunction值。可以使用cumsum操作。结果是得到同样长度的ObjectFunction值的数组,取其中的最小值,该目标函数最小值对应着一个距离$d_i$,这个距离$d_i$就可以作为第i帧的$d_{threshold}$,用于第i帧与其他帧(第j帧)的重叠率估算。
1.2 计算第i帧与其他帧的重叠百分比
对于第$i$帧,我们现在有其$d_{threshold}$。那么求$\xi_{i,j}$,即为:使用NN寻找点对pair$(P_i,P_j)$,然后从小到大排列,取$d < d_{threshold}$的部分。假设有$N_j^{'}$个点对满足要求。那么重叠百分比$\xi_{i,j} = N_j^{'} / N_j$,$N_j$为第j帧的点。
2. 根据估算得到的${\xi_{i,j}}$,选择重叠率高的scan pair,应用TrICP算法求解其relative Motion $M_{i,j}$
2. 应用运动平均算法
在应用Motion Average前,我们已经有了初始的Global Motion以及一系列Relative Motion。
运动平均的主要思想是,将relative Motion看作是global Motion的某种组合。先求出$\Delta M_{i,j}$,将其转换为李代数对应的6x1的向量。然后通过Average的思想,求出global Motion的变化值。
2.1 计算relative motion $M_{i,j}$的变化值
通过global motion,可以求出$\Delta M_{i,j}$
$$
\Delta M_{i,j} = M_i^0 M_{i,j} {(M_j^0)}^{-1}
$$
2.2 转换为李代数,从SE(4) 到 se(4)
$$ \Delta m_{i,j} = logm(\Delta M_{i,j}) $$
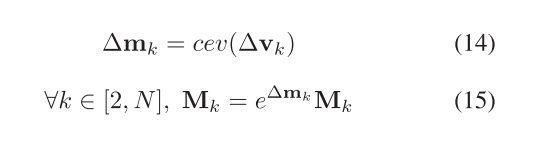
2.3 求李代数上变化量的均值
首先先使用映射将其李代数映射为其对应的六元向量: $$ \Delta v_{i,j} = vec(\Delta m_{i,j}) $$
然后构造一个矩阵D,应用如下公式即可求出global motion的Average值。
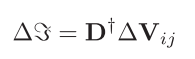
$D_{i,j}$在第i列是$-I$,在第j列为$I$。
D的含义可能比较难理解,我们有:
$$
\Delta \zeta = D^{\dag} \Delta V_{i,j}
$$
$$
D \Delta \zeta = \Delta V_{i,j}
$$
 该符号打不出来,我们用$\Delta \zeta$代替了。
该符号打不出来,我们用$\Delta \zeta$代替了。
举个例子:
一共3个scan。relativeMotion有两个,假设为$\Delta v_{1,2}, \Delta v_{1,3}$。
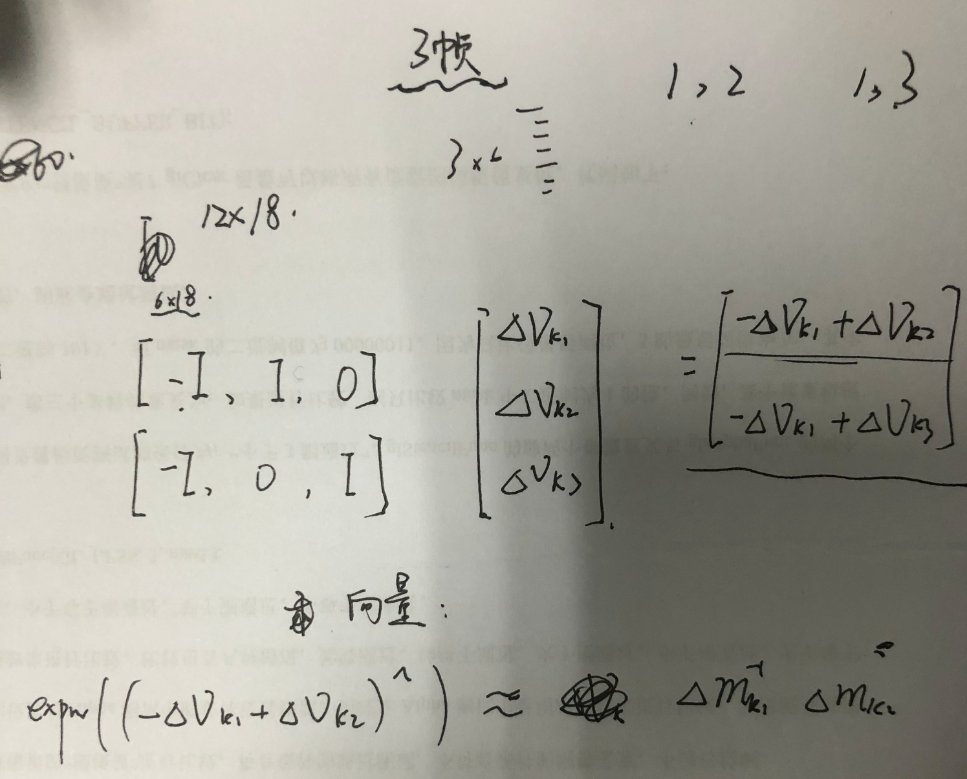
可以看出来,通过D对$\Delta \zeta$的线性变换,的确得到了$\Delta v_{i,j}$的另一种表现形式,所以对D求伪逆,左乘在$V_{i,j}$旁,即可得到包含有global motion的结果。
2.4 根据求得的global motion difference,变换回SE(4),对现有Motion进行更新。
2.5 判断是否满足条件,若不满足重新回到2.1, 若满足退出。
条件: